Display Processing¶
Satellite imagery is not directly viewable on a standard monitor. Electro-optical (EO) sensors capture at high bit depths (11–16 bits) and synthetic aperture radar (SAR) sensors produce complex-valued (floating-point I/Q) pixels. The toolkit contains pixel processing operations needed to convert these raw measurements into 8-bit images suitable for display.
The toolkit provides three components:
ProcessingChain— an ordered sequence ofndarray → ndarrayoperations that tracks output metadata. Constructed from a list of callable steps along withoutput_bands,output_dtype, and optionalinput_bands. Multiple chains can be merged into one withcompose().DisplayChainFactory— a metadata-aware builder that inspects an image source and constructs the appropriate chain automatically. Examines NITF subheader fields (PVTYPE,IREP,ICAT,ISUBCAT) and GeoTIFF tags to classify image modality, select band mappings, and configure dynamic range adjustment.MappedImageProvider— wraps a source asset and applies a processing chain to every block on read. Acceptssource_bands(which bands to decode from the source) andnum_bands(output band count) so only the required data is fetched and transformed. An optionalTileCacheavoids redundant processing for repeated block requests.
Quick Start¶
from aws.osml.io import IO
from aws.osml.image_processing import DisplayChainFactory, MappedImageProvider
with IO.open("image.ntf", "r") as reader:
source = reader.get_asset("image:0")
# Build the display chain (auto-detects modality, band count, etc.)
chain = DisplayChainFactory.build(source)
# Wrap the source with the chain for block-level display
display = MappedImageProvider(
source, chain,
source_bands=chain.input_bands,
num_bands=chain.output_bands,
)
# Read display-ready blocks
tile = display.get_block(0, 0) # uint8 output
The factory examines NITF subheader fields (PVTYPE, IREP, ICAT,
ISUBCAT) and GeoTIFF tags to classify the image modality and select
the correct processing steps.
Dynamic Range Adjustment¶
DRA maps the sensor’s wide pixel range to the 8-bit (0–255) display range by computing boundaries from cumulative histogram percentiles (default: 2nd and 98th). Pixels outside these boundaries are allowed to clip, and the interior is linearly mapped to fill the output range.
# Factory auto-detects and applies DRA (default)
chain = DisplayChainFactory.build(source)
# Explicit DRA
chain = DisplayChainFactory.build(source, range_adjustment="dra")
# Simple min-max stretch (no outlier handling)
chain = DisplayChainFactory.build(source, range_adjustment="minmax")
Input Distribution¶
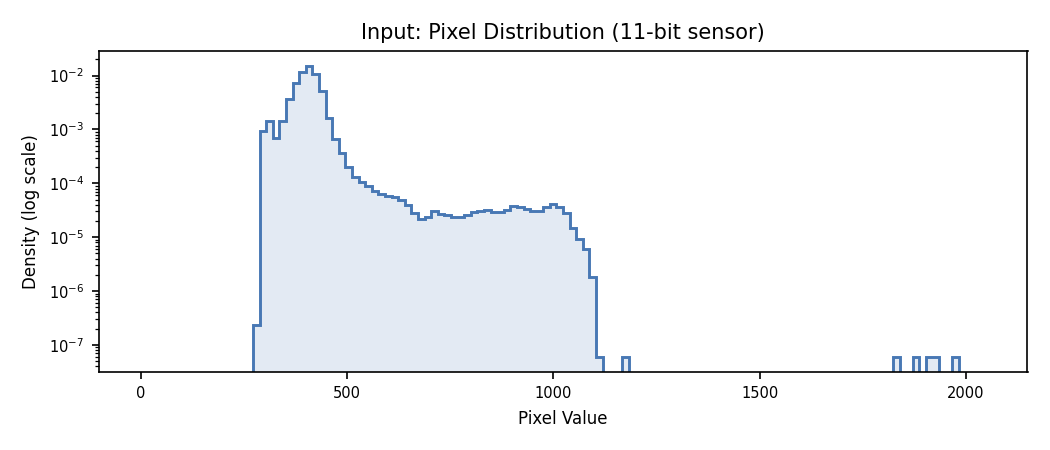
Panchromatic sensors capture light across the entire visible spectrum (roughly 450–900 nm) in a single broadband channel. Because all wavelengths contribute to one measurement, the sensor collects more photons per pixel than any individual spectral band — yielding the highest spatial resolution of the satellite’s imaging modes. The resulting image is a single-band grayscale intensity map.
The following histogram shows pixel distribution from a single-band panchromatic satellite tile (11-bit effective dynamic range stored as uint16). The data occupies a narrow region in the lower portion of the available 0–2047 range.
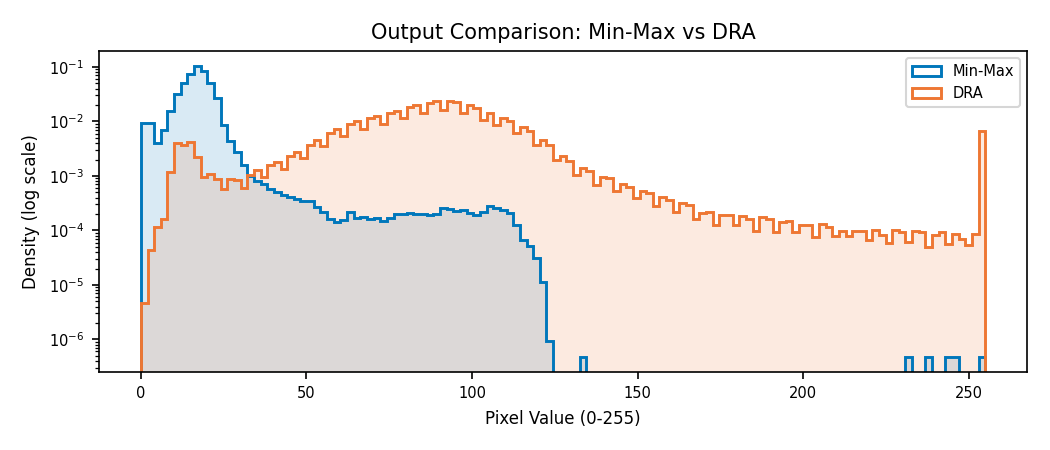
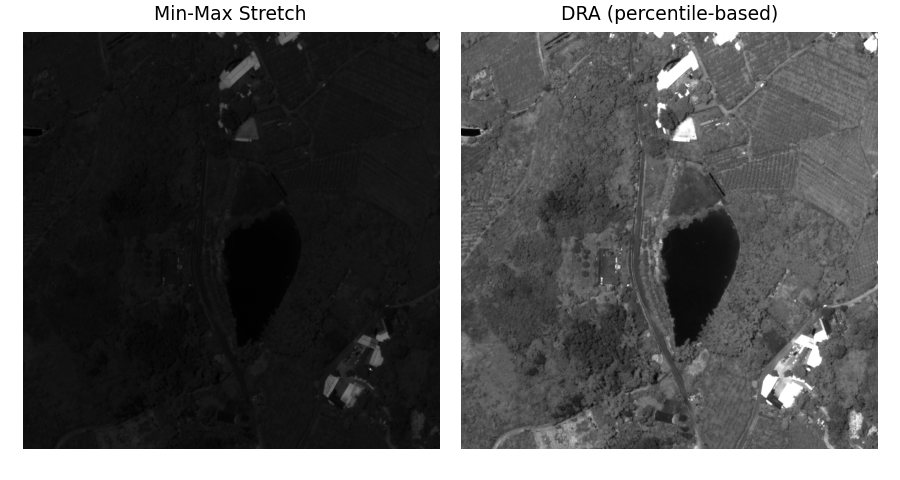
Min-Max vs. DRA Output¶
Min-max stretch maps from the actual minimum to maximum pixel value. Outliers (specular reflections, dead pixels) dominate the mapping and compress the bulk of scene content into a narrow output band. DRA ignores those outliers via histogram percentiles and dedicates the full 0–255 range to the scene’s dominant content.
Band Selection¶
Multispectral sensors divide the electromagnetic spectrum into discrete bands — typically 4–12 channels spanning visible, near-infrared (NIR), and shortwave infrared (SWIR) wavelengths. Each band isolates a narrow spectral window (e.g. 630–690 nm for red, 770–895 nm for NIR), enabling analysis of material properties invisible to the human eye. Hyperspectral sensors take this further, sampling hundreds of contiguous bands at ~10 nm intervals to produce a near-continuous spectrum per pixel.
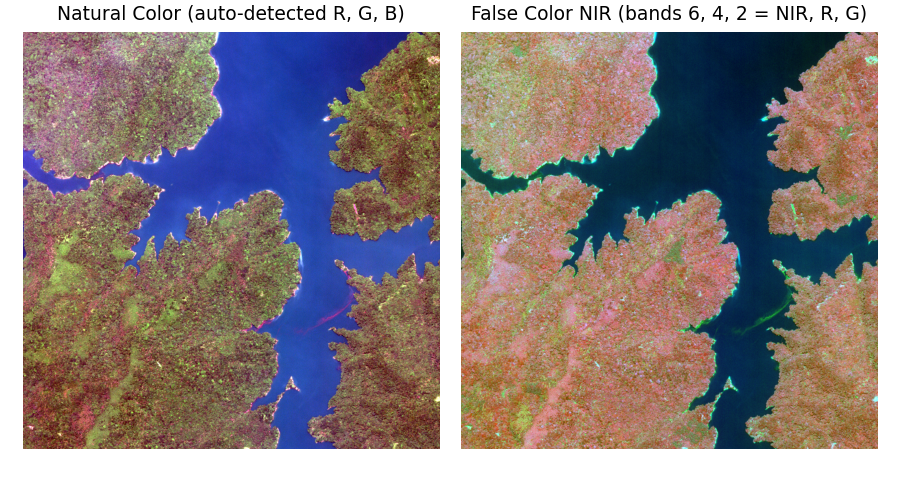
A standard monitor has only three channels (red, green, blue), so displaying an N-band image requires selecting which three source bands map to the RGB output. The choice determines what information is visible:
Natural color assigns red, green, and blue bands to their respective display channels — producing an image that approximates what a human would see from orbit.
False color composites assign non-visible bands (NIR, SWIR) to display channels, revealing features like vegetation health (NIR appears bright for photosynthetically active canopy) or moisture content that are invisible in natural color.
The factory auto-detects RGB band assignments from metadata (NITF
IREPBAND, GeoTIFF PhotometricInterpretation, BANDSB TRE
wavelengths). Override with band_selection:
# Natural color from an 8-band multispectral sensor
chain = DisplayChainFactory.build(source, band_selection=(4, 2, 1))
# False color NIR composite
chain = DisplayChainFactory.build(source, band_selection=(6, 4, 2))
The selected bands are stored in chain.input_bands — pass this to
MappedImageProvider so only the required bands are decoded from the
source:
display = MappedImageProvider(
source, chain,
source_bands=chain.input_bands, # Only decode needed bands
num_bands=chain.output_bands,
)
SAR Complex Imagery¶
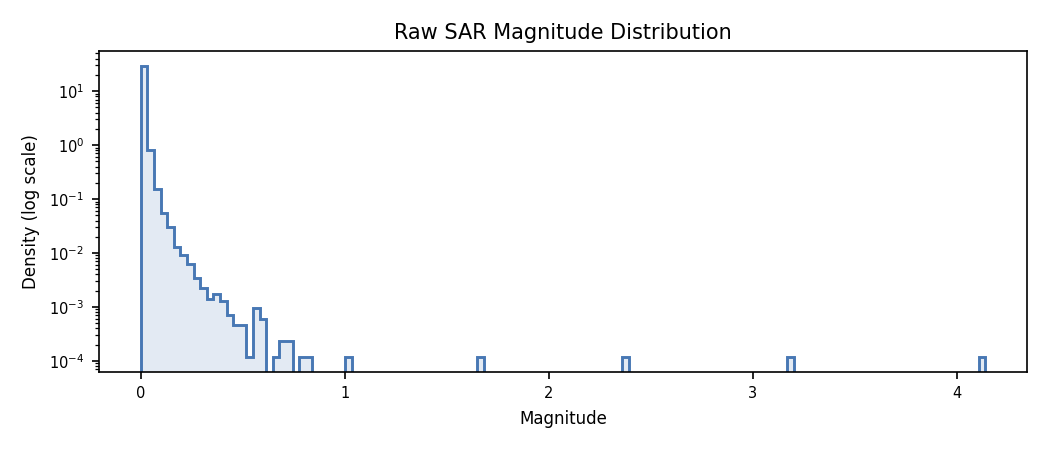
SAR sensors produce complex-valued pixels — each pixel carries an in-phase (I) and quadrature (Q) component representing the amplitude and phase of the radar return. These complex values cannot be displayed directly; they must be converted to scalar magnitudes suitable for rendering on a monitor.
The fundamental challenge is dynamic range. A SAR scene’s dynamic range — from the noise floor to the brightest discrete scatterer — can exceed 100 dB. The human visual system perceives only 30–40 dB of tonal variation, and an 8-bit display encodes at most 48 dB. Pixel magnitudes of distributed clutter follow a Rayleigh distribution: most energy concentrates at low amplitudes while discrete targets (buildings, vehicles, corner reflectors) produce returns orders of magnitude brighter.
A nonlinear remap compresses the scene’s dynamic range into the perceivable range so that clutter structure — the low-level detail an analyst needs for exploitation — becomes visible while bright discrete targets remain distinguishable. Different remap functions make different tradeoffs between compression strength, detail preservation in the clutter, and noise visibility.
The toolkit handles this with a two-step workflow:
Detect and remap complex sources to scalar magnitudes using a nonlinear compression function.
Build the display chain on the remapped data — the factory treats it identically to any EO image for final DRA and quantization.
from aws.osml.io import IO
from aws.osml.image_processing import (
ComplexRemapFactory,
DisplayChainFactory,
MappedImageProvider,
is_complex,
load_complex_remap,
)
with IO.open("sicd_image.ntf", "r") as reader:
source = reader.get_asset("image:0")
if is_complex(source):
# Option A: auto-extract metadata from reader (SICD DES, NITF subheader)
remapped = load_complex_remap(reader, asset_key="image:0")
# Option B: explicit factory with known band interpretation
remapped = ComplexRemapFactory.build(
source,
band_interpretation=["real", "imaginary"],
remap="quarter_power",
)
else:
remapped = source
# Build DRA chain on scalar data (same as EO)
chain = DisplayChainFactory.build(remapped)
display = MappedImageProvider(
remapped, chain,
source_bands=chain.input_bands,
num_bands=chain.output_bands,
)
tile = display.get_block(0, 0) # uint8 output with correct contrast
Note
is_complex() is a helper that examines the pixel type and common NITF
metadata (image category, band subcategories, image representation) to
determine whether the pixels should be interpreted as complex values.
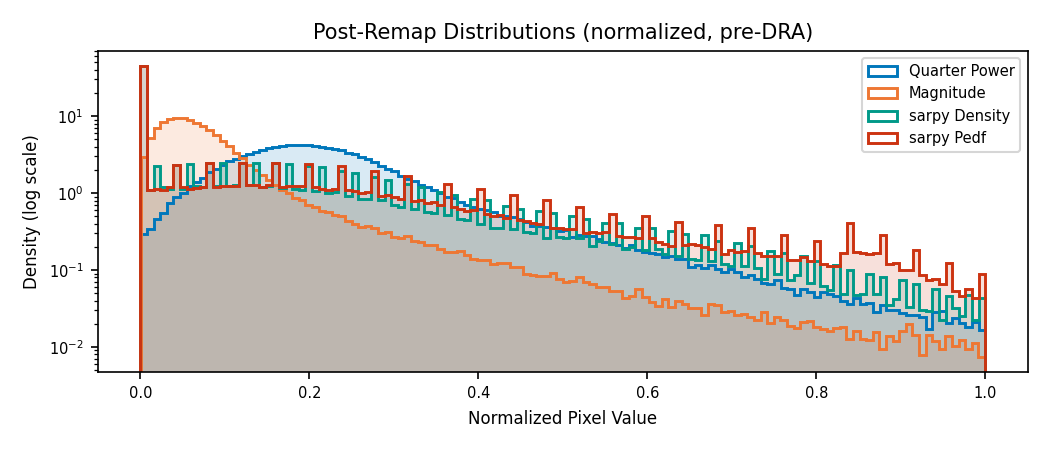
Built-in Remap Presets¶
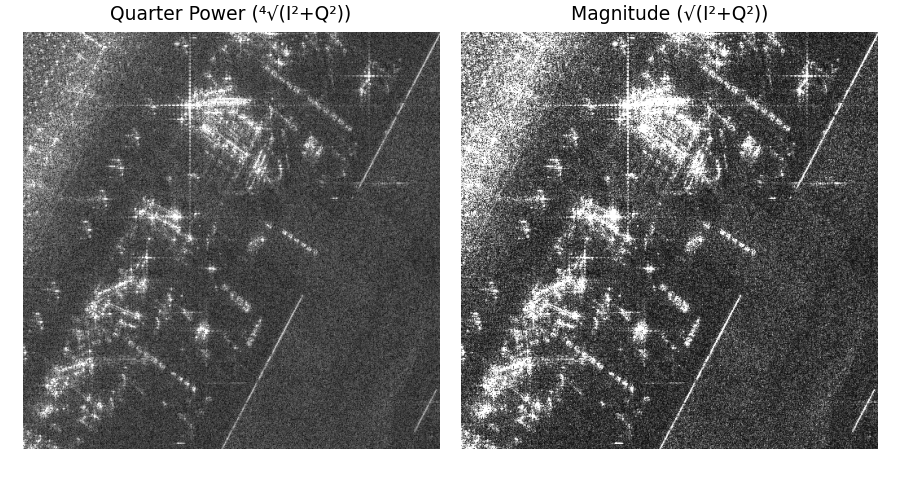
"quarter_power" (default)
- Formula:
\(\sqrt[4]{I^2 + Q^2}\)
Compresses dynamic range via fourth-root scaling. Produces a roughly Gaussian distribution ideal for DRA percentile clipping. Best general-purpose choice — reveals scene structure while suppressing speckle.
"magnitude"
- Formula:
\(\sqrt{I^2 + Q^2}\)
Linear magnitude. Preserves relative amplitudes but produces a heavy-tailed distribution that may need aggressive DRA clipping. Useful when relative backscatter intensity must be visually comparable across the scene.
Both presets return (1, H, W) float32 output.
Using sarpy Remap Functions¶
The sarpy library provides
additional remap algorithms that integrate via the custom callable
interface on ComplexRemapFactory:
Algorithm |
Approach |
Best for |
|---|---|---|
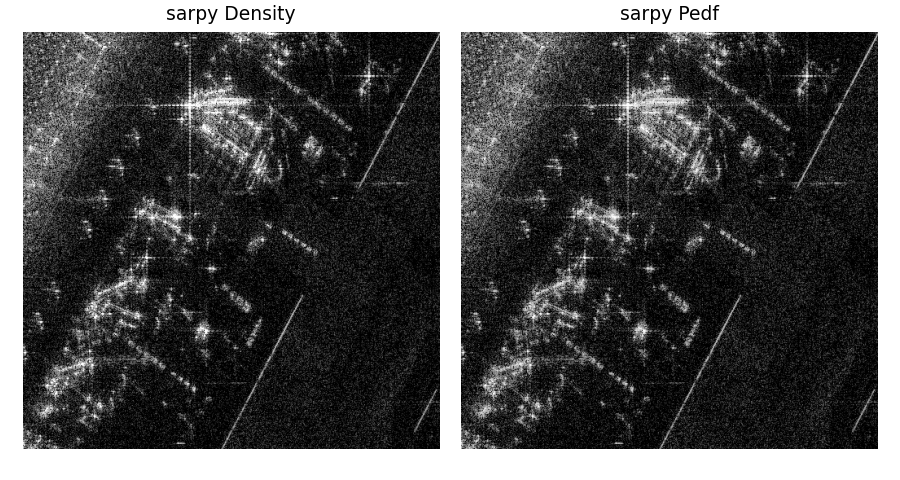
Density |
Histogram equalization on magnitude |
Maximum local contrast; useful for visual inspection of cluttered urban scenes |
NRL |
Log-scale with noise floor estimation |
Balanced display with noise suppression; general-purpose alternative to quarter-power |
PEDF |
Piecewise-linear equalized density |
Preserves detail in both bright and dark regions; good for scenes with wide brightness variation |
import numpy as np
from sarpy.visualization.remap import density, nrl, pedf
def sarpy_adapter(sarpy_remap_fn):
"""Wrap a sarpy remap as a ComplexRemapFactory-compatible callable."""
def remap(block):
# block is (2, H, W) float32 I/Q
complex_data = block[0].astype(np.float64) + 1j * block[1].astype(np.float64)
display = sarpy_remap_fn(complex_data)
return display[np.newaxis, :, :].astype(np.float32)
return remap
remapped = ComplexRemapFactory.build(
source,
band_interpretation=["real", "imaginary"],
remap=sarpy_adapter(nrl),
)
Custom Processing Chains¶
For cases not covered by the factory, build a ProcessingChain directly.
Multiple chains can be merged into one with compose():
import numpy as np
from aws.osml.image_processing import ProcessingChain, compose
def my_preprocess(image):
...
def my_dra_step(image):
...
preprocess = ProcessingChain(
steps=[my_preprocess],
output_bands=3,
output_dtype=np.dtype(np.float32),
input_bands=(4, 2, 1),
)
dra = ProcessingChain(
steps=[my_dra_step],
output_bands=3,
output_dtype=np.dtype(np.uint8),
)
chain = compose(preprocess, dra)
result = chain(raw_block)